これはなに?
電子工作に使われる「Arduino」について知ってもらう記事です。初期投資も少なく手軽に行えるため、興味がわいたらぜひ初めてみてください。
もくじ
- Arduinoって何?
- Arduinoボードの種類
- Arduinoを使った開発
1.Arduinoって何?
ArduinoはArduinoマイコンボードとArduino IDE(開発環境)の総称です。C言語ライクなArduino言語を使ってプログラミングを行います。ボードへの書き込みはArduinoボードとPCをUSBで繋ぎ、IDEの書き込みボタンを押すだけで完了です。専用機器を用意したり、回路を組んで流し込むなんてことは必要なくて敷居が低いです。
また、マイコンボードから開発環境まですべてオープンソースで公開されており、機能追加をしたり安価なパーツを使用して低コスト化を実現した互換ボードがあったりするのが特徴です。
説明からプログラム例まで超まとまっていたサイトがあるので詳しくはArduino のすすめを見てください。
2.Arduinoボードの種類
Arduino公式サイトのHARDWARE(https://www.arduino.cc/en/Main/Products)で現在流通しているArduinoを見ることができます。今回はUno、Nano、Leonardo、Micro、Megaに絞って軽く説明します。
また、互換機について実体験に基づく注意点を書いておこうと思います。
2.1 Arduino Uno

最も標準的なArduinoボードです。マイコンはATmega328Pが使われています。
センサ入力等に使うアナログ入力ピンが6本(A0~A5)、電圧の高低について読み込み、書き出しが行えるデジタルピンが14本、そのうちの6本がPWM(Pulse Width Modulation)ピンです。
ちなみにPWMピンはServoライブラリを使うときに使用したりします。
また、どのボードでも言えることなのですが、アナログピンはデジタルピンとして使用することもできます。Unoの場合、アナログ入力を行わない場合は最大20本まで使用することができます。
2.2 Arduino Nano

Arduino Unoを小さくしたものです。後に説明するMicroより小さいです。マイコンはUno同様ATmega328Pが使われています。
各ピンはUno同様、アナログピンが8本(A0~A7) 、デジタルピンが14本、うち6本がPWMピンです。
ピンヘッダが実装されているため、ブレッドボードに直接差し込んで利用することができます。
2.3 Arduino Leonardo

Arduino UnoのマイコンをATmega32u4に変更したものです。このマイコンを積んでいるArduinoはHIDデバイスと認識させることが可能で、キーボードやマウスを作ることができます。UnoやNanoでもがんばればできるけど省略します。
アナログピンは12本(A0~A12、裏面に該当デジタルピンが記述されています。)、デジタルピンが14本あり、うちPWMピンが7本あります。複数用途があるピンがあるため、デジタルピンとして使用できるピンは最大20本です。
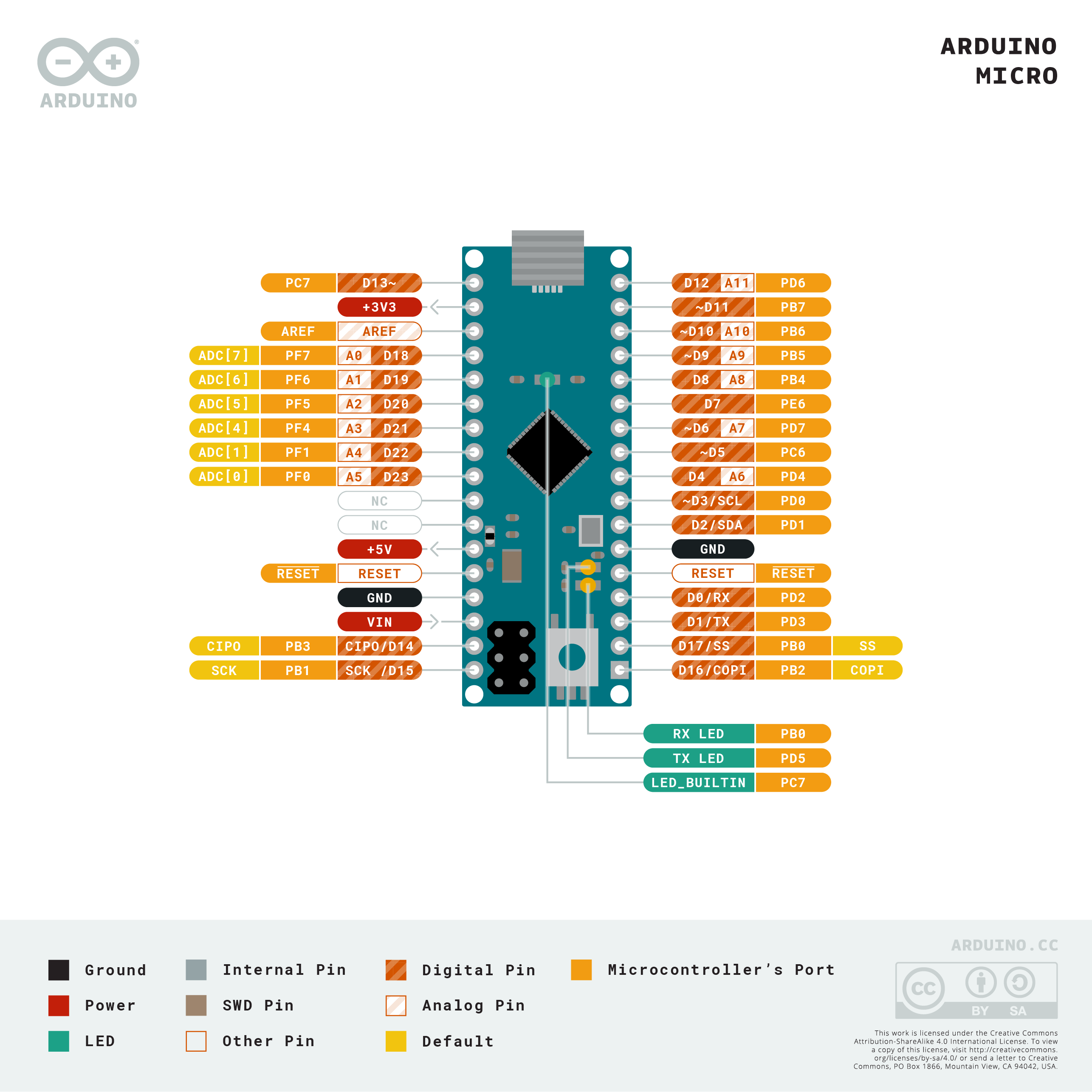
2.4 Arduino Micro

Arduino Leonardoを小型化したモデル。マイコンはLeonardoと同じくATmega32u4のため、これもマウスやキーボードを作ることができます。
各ピンもLeonardoと同じく、アナログピンが12本、デジタルピンが14本あり、うち7本がPWMピンです。アナログピンについては上記公式ページの「DOCUMENTATION」にある通りとなっています。こちらもデジタルピンは最大20本使用できます。
2.5 Arduino Mega 2560

いろいろデカいです。使われているマイコンはATMega2560です。メモリやフラッシュ(プログラムを書き込む場所)UnoやLeonardoに比べて大きいです。
アナログピンが16本、デジタルピンが54本、うち15本がPWMピンです。
2.6 互換機について注意点
1.で説明した通り、Arduinoはハードウェアまでオープンソースとなっているため、Amazonなんかでは互換機がたくさん発売されています。
基本、公式と使い勝手は変わらないのですが、経験上何回か躓いたことがあったので書いておきます。
2.6.1 USBで繋いだときに認識しない
Arduinoのプログラムを書き込むとき、シリアル通信を行って書き込むのですが、そのシリアル通信を行うチップが本家と異なる場合があり、繋いでも認識しない場合があります。
その場合、使用されているUSB-シリアルを確認してドライバを探し、インストールする必要があります。
認識後は本家同様に使用できます。
2.6.2 [重要]一部スペックが異なる場合がある。
めっちゃ大事です。
安いArduino互換機ではレギュレータ(入力電圧を変圧し、一定の電圧を出力するもの)が本家と違う場合があり、最大入力電圧が違う場合があります。
きちんと互換機のデータシートを見て使用してください。くれぐれも公式のデータシートを使わないことです。
ちなみにぼくはこのミスで部所有の互換Megaをひとつ壊しました。あーあ。
3. Arduinoを使った開発
基本的には2.で説明したボードを入手し、PCにArduino IDE(https://www.arduino.cc/en/software)を入れてプログラム書いて書き込んで終わり!って感じです。
…が、それで終わるのもあれなので、VSCode+プラグインを使用した環境を軽く書きます。Arduino IDEより書きやすいと思うので、ぜひ一度試してみてください。
3.1 Visual Studio Code(VSCode)
軽くてプラグインがいっぱいで便利なエディタです。(公式サイト)
Arduino以外にもCやPython、シェルスクリプト等を書くときにも使えますし、入れといて損はないと思います。
何か困ったことがあった時に情報が多いのも強みです。
3.2 プラグイン
この記事(https://qiita.com/narikei/items/847613a8f01a9e1527d7)が役に立ちます。
3.3 Arduino言語
翻訳したリファレンス(http://www.musashinodenpa.com/arduino/ref/)がとても参考になります。
基本、void setup()とvoid loop()で構成されます。setup()は起動時に一回のみ、loop()は起動後繰り返し実行されます。
また、Arduino言語ではプロトタイプ宣言が必要ありません。
あと、タブで記述ファイルを変更できます。機能ごとに分けてあげると使いまわしが効くでしょう。
まとめ
今回はArduinoを紹介しました。マイコンボードではこれだけではなく、ESP32とかSTM32とかあるんでぼくも使ってみたいねえ









